A class of metacaps with rich nonlinear mechanical behaviors, which addresses the challenges of limited and often slow actuation speeds, complex control systems, and the absence of sensing capabilities associated with soft robots.
Problem:
Soft Robots have undergone considerable development over the past decades due to their intrinsically compliant body, which enables safe interaction with humans and adaptability to unpredictable environments. Spherical caps have been widely used in the design of rapidly responsive soft robots, but the performance of the robots is restricted by the intrinsic properties of the caps, such as limited and often slow actuation speeds, requirement of complex control systems, and absence of sensing capabilities.
Solution:
A class of metacaps with rich nonlinear mechanical behaviors, which enable a variety of soft robotic systems with unprecedented functionalities, including a passive gripper with sensing capabilities that enable grasping of objects in 3.75 ms upon contact, a pneumatic actuated gripper with tunable actuation speeds to grasp objects of different mass and rigidity or softness (e.g. a strawberry vs. a plastic sphere), a swimming robot with amplified swimming speeds, and an untethered, electronics free-swimming robot with tunable actuation speeds.
Technology:
The inventors designed a metacap consisting of an array of ribs on a simple cap such that the bending stiffness of the cap can be fine-tuned locally. The finite element analyses revealed that metacaps showed a more pronounced snap-through behavior, i.e. the ability to turn inside-out due to a pneumatic, hydraulic, electric or magnetic trigger, as compared to other caps, and could achieve another equilibrium state after the occurrence of a snap, so called bistability, in contrast to simple spherical caps.
Advantages:
- Greater energy storage and release than other caps as a result of the snap-through behavior
- Bistability: Metacap has two stable positions- undeformed and everted
- Metacap enabled grippers are capable of grasping objects both passively and rapidly, and gently manipulating soft and delicate objects vs. rigid and strong ones
- Metacaps can be used to amplify the mechanical responses of other actuators for applications that require a high transient output power
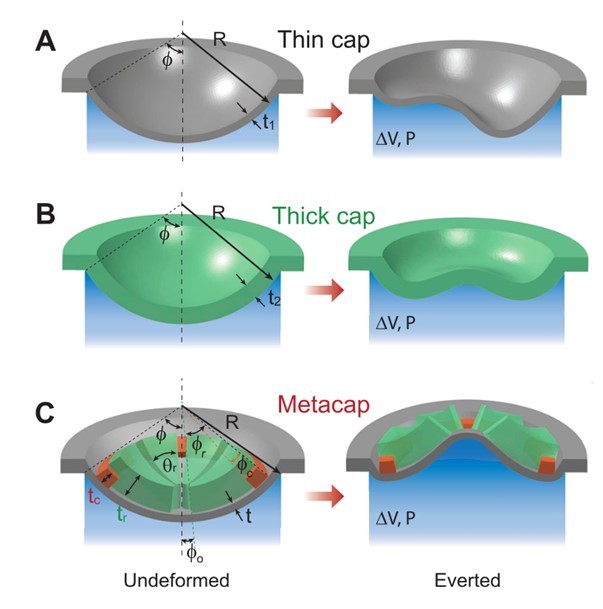
(A) Simple spherical caps with uniform thickness and clamped borders are typically monostable and are extremely sensitive to imperfections when the thickness to radius ratio is small, leading to limited energy release upon snapping. (B) Even though increasing the thickness to radius ratio can make the caps more robust, the large thickness would compromise snapping behavior. (C) The inventors designed a metacap by introducing an array of ribs to a simple cap aligned in the circumferential and radial directions, which gives rise to rich nonlinear mechanical properties and enables a variety of soft robotic systems with unprecedented functionalities.
Reference Media:
- Jin, L et al.; Adv. Intell. Syst., 5(6): 2300039