A kirigami-inspired robot made without hard electronic controls, with soft modular sensors for navigating diverse environments.
Problem:
Soft robots are promising new machines that can adapt and operate in diverse confined and dynamic environments. Such machines are promising for industrial manufacturing, exploratory, and medical applications. For instance, engineers have created soft robotic gloves that assist the human grip, octopus-shaped swimmers that navigate tight spaces underwater, and even tiny crawling robots that can deliver drugs inside the human body. Current designs for soft robots incorporate sensors and actuators made from hard electronic materials, limiting their flexibility and possibilities for miniaturization.
Solution:
This technology is a soft robot designed with zero hard electronics-based actuators or sensors. The robot is outfitted with multiple soft modular control units that enable decision-making in diverse environments. This enables superior flexibility and potential for miniaturization, as no traditional electronics are needed.
Technology:
Soft robots unlock their full potential when their components are as flexible as possible. Guided by this principle, the authors developed a clever soft robot design incorporating kirigami – the traditional Japanese art of folding and cutting paper – to control the robot’s moving direction. Their design uses an inflatable silicone actuator to drive kirigami expansion, which powers locomotion through angled feet. Materials responsive to heat, light, or chemicals like liquid crystal elastomers or hydrogels activate control modules within the kirigami to sense and pilot the robot, all with zero electronics.
Advantages:
- Zero hard electronic materials
- Sensitive to heat, light, or chemical changes
- Bending angle up to 30 degrees
- Operates at temperatures up to 150°C
- Decision-making capabilities by constructing logic gates using sensing modules
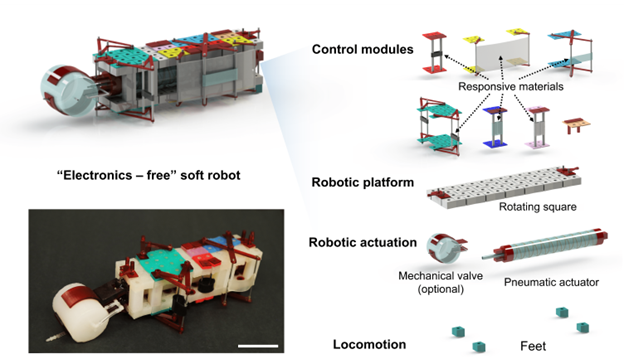
Design of the electronics-free soft autonomous robot. The soft robot comprises a kirigami-inspired body, a pneumatic actuator (mechanical valve is optional), multiple types of control modules (with responsive materials), and feet (to enable locomotion).
Case ID:
22-10001-tpNCS
Web Published:
5/12/2023
Patent Information:
| App Type |
Country |
Serial No. |
Patent No. |
File Date |
Issued Date |
Expire Date |