A material mixture (active colloids immersed in nematic liquid crystals) that act as microrobots for directed assembly and micromanipulation of passive colloidal particles.
Problem:
Colloids interact with areas of distortion, such as with walls or with defects in the environment such as sharp edges and can become trapped along disclination lines in passive systems. These strong interactions mean that once colloids are assembled, they can only be dis-assembled by going into the isotropic state to eliminate the elastic interactions, and thus cannot be deliberately positioned at a particular location in the domain. Thus, it is difficult for passive colloidal particles to undergo directed assembly or micromanipulation.
Solution:
Development of active colloids as microrobots for dynamic manipulation of passive colloids. The microrobots: (I) Can have shapes designed to promote lock and key interactions. (II) Can also have anchoring conditions designed to form disclination lines attached to the active colloid.
Technology:
For lock and key microrobotics, the authors designed a multi-armed magnetic microrobot with companion defect to manipulate passive nematic colloid. This microrobot has a companion dipolar defect on one of its arms aligned with the far-field director field and can interact with passive colloids in nematic liquid crystals. The authors deliberately use disclination lines as a tool for robotic assembly and motion and attach them to mobile colloids in nematic liquid crystals. When the colloids move under an external field, the disclinations elongate with complex dynamics, thus driving motion in active colloids and subsequent interactions with passive colloids.
Advantages:
- Multi-armed microrobot can micromanipulate passive colloids
- Microrobot can interact with colloids in Saturn ring or dipolar defect configuration
- Can assemble in multiple configurations (i.e. passive colloids with dipolar defects assemble in 3 different configurations)
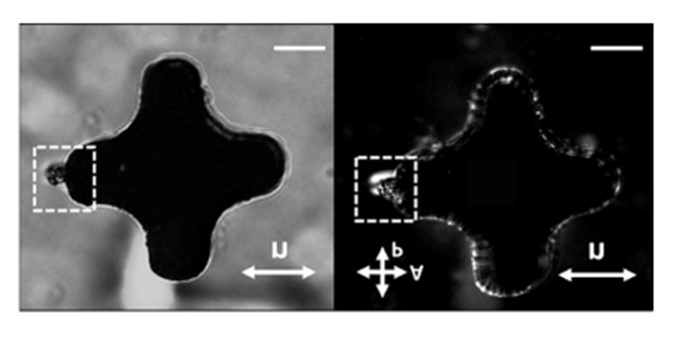
Microscopic images of multi‐armed microrobot. Bright field (left) and cross polarizing (right). Scale bar is 20𝜇𝑚.
Case ID:
21-9742-TpNCS
Web Published:
11/12/2024
Patent Information:
| App Type |
Country |
Serial No. |
Patent No. |
File Date |
Issued Date |
Expire Date |